
教學園地:109-2學期「機動學」課程專題 電子報編輯-2A葉倧麟、2B曹珺傑
由楊大中老師教授的大二必修課「機動學」,此門課主要在講述機器的內部構造,並研究機構運作時,內部零件之間的相互作用,以四連桿機構為例,四連桿是由四個剛體所組成的結構,其中一個剛體做圓周運動時,其餘剛體會產生相對運動。
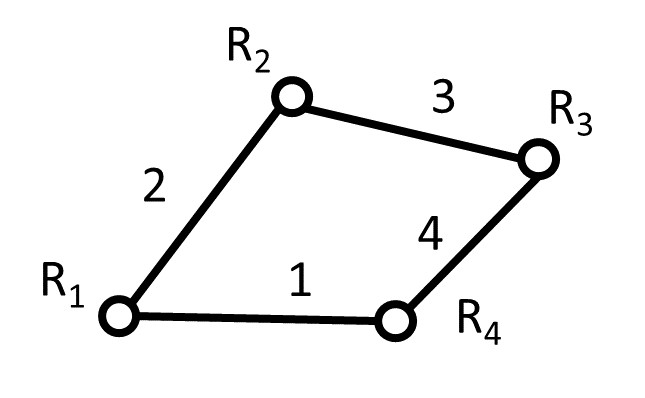 |
四連桿範例(楊大中教授製作)
楊大中教授訂定「走路恐龍玩具」專題,讓學生們在學習機動學的同時,能活用機構知識,為課程增添樂趣,並提高教學品質。「走路恐龍」原理為利用四連桿機構,以連桿與連桿之間的連結,產生連桿之間的特殊運動,通過外力或馬達驅動,使其四連桿做出恐龍的走路模式。楊大中教授表示,在規劃課程前常常在思考,如何制定一個契合機動學主題又讓同學們提起興趣的專題,最終認為製作玩具是最好的方式,希望學生們能透過此次專題,從中分析整個結構之間的相互作用與距離,呈現出流暢的運動,並發揮想像力對的機構進行改造與外觀裝飾。
跑路恐龍:3B吳亞哲、3B李沃勳、3B曾冠誠
我們這組運用四連桿機構(曲柄搖桿),再加上自己的機構改造,製作了有爬坡能力的恐龍玩具,結構部分我們利用後輪的馬達驅動前輪轉動,並利用前輪的四連桿機構帶動「恐龍腳步運動」,再透過凸輪使恐龍嘴巴有「開合」的能力,模擬恐龍走路的樣子。在實際製作時,發生了許多問題,外表看似簡單的紙板機構組合,但每個零件的材質、大小都會影響到整體機構的運行,其中最困難的是測試爬坡能力時,因為後輪動力大於前輪,會有重心不穩的問題,所以我們增加了後輪的重量來增加輪子的抓地力,讓恐龍走上坡時更順暢。
 |
優秀組別組員:3B吳亞哲、3B李沃勳、3B曾冠誠
走路皮卡丘:3B黃偉、3B楊貴婷、3B吳庭宜
這次的期末專題,我們先用AutoCAD設計機構外觀,再使用SolidWorks來模擬機構的運作是否順暢,為了能方便對零件的尺寸做微調,以紙箱和鐵絲做為機構材料,我們利用手來推動皮卡丘,輪子轉動時驅動四連桿機構的運行,讓皮卡丘的腳順著輪子運動,並帶動內部的凸輪,讓纏繞在凸輪上的鐵絲上下移動,以此表現出皮卡丘頭上的「天線」上下移動的現象。在正式製作皮卡丘時,皮卡丘內部的鐵絲脫離凸輪轉軸,導致頭上天線無法上下移動的狀況,後來發現只要增加鐵絲的牢固度,就可以解決這個問題了。
 |
優秀組別組員:3B黃偉、3B楊貴婷、3B吳庭宜